ICAPS 2022 System Demonstrations
Demos will be available in gather.town at all times throughout the ICAPS conference. See at the bottom of each card the guaranteed authors' availability time slots. However, the authors might be available to discuss their demo outside the suggested time slots during the "Poster and Demo sessions"
You can also access the demo videos from the cards below, and you will be required to use the common conference password provided via email.
Voting
Log in to gather.town to vote for the best demo award. Voting will be open from June 23, 2022 11UTC
Demos
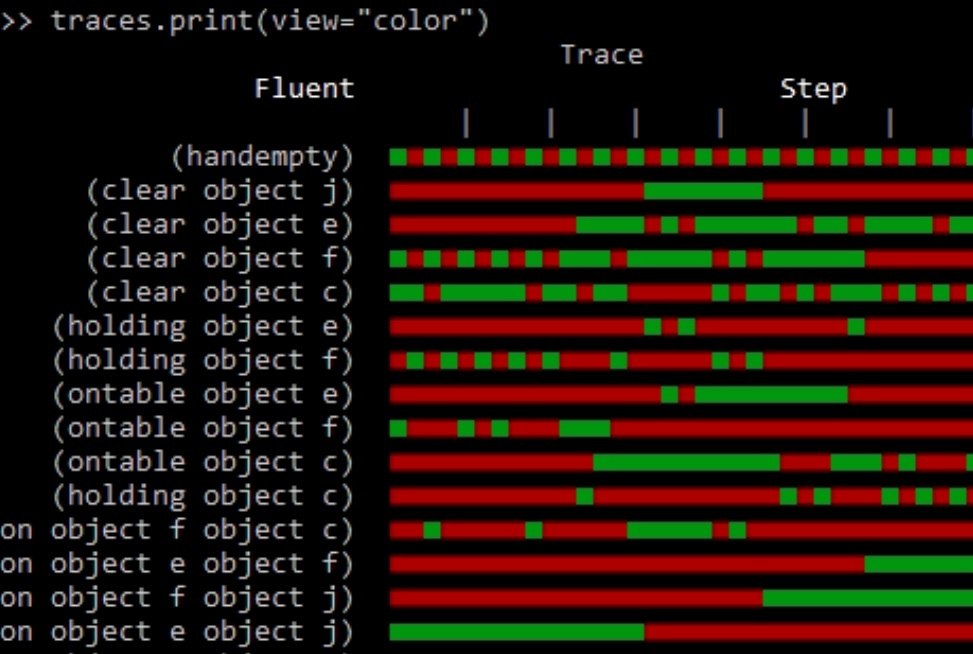
(3rd Place) Unified Planning: A Python Library Making Planning Technology Accessible
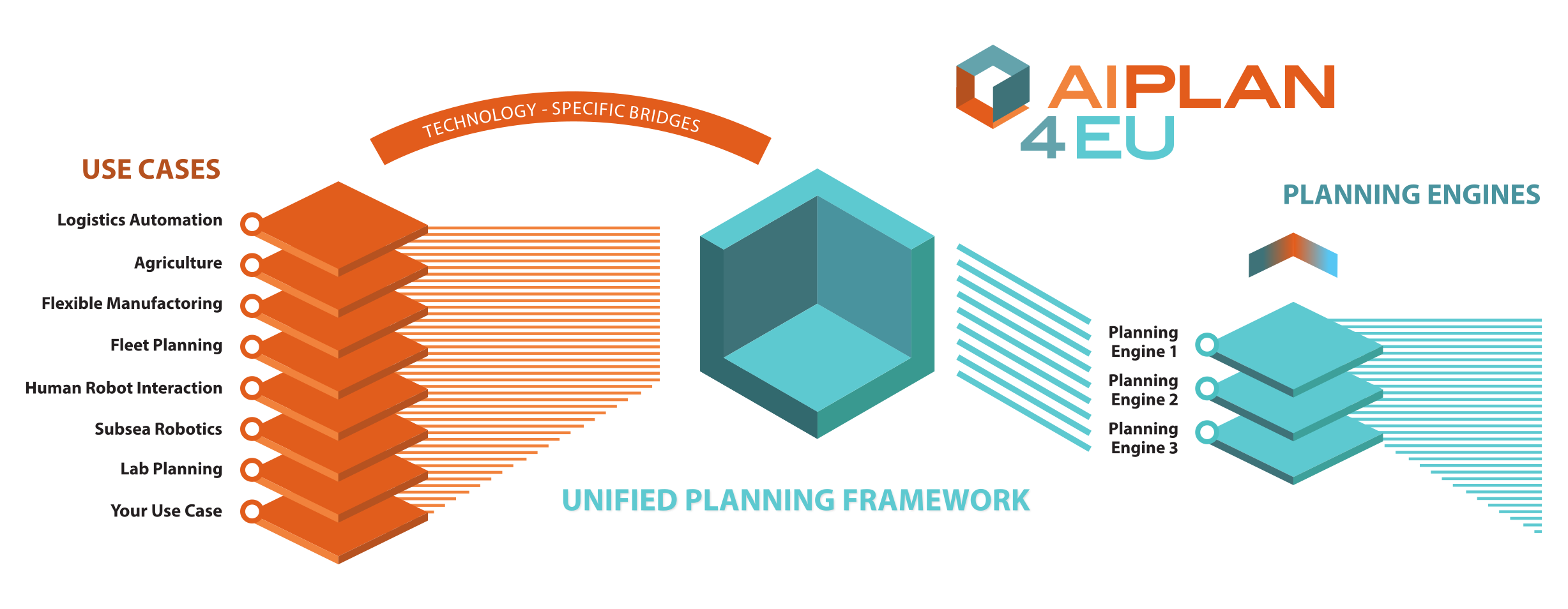
Andrea Micheli, Alexandre Arnold, Arthur Bit-Monnot, Luigi Bonassi, Luca Framba, Alfonso Gerevini, Selvakumar Hastham Sathiya Satchi, Malte Helmert, Félix Ingrand, Luca Iocchi, Uwe Köckemann, Oscar Lima, Fabio Patrizi, Federico Pecora, Guillaume Poveda, Gabriele Röger, Alessandro Saetti, Alessandro Saffiotti, Enrico Scala, Ivan Serina, Sebastian Stock, Florent Teichteil-Koenigsbuch, Alessandro Trapasso, Paolo Traverso and Alessandro Valentini
Scheduled Sessions
- Day 1: 11UTC
- Day 1: 18UTC